My favorite pilot is Charpu. He is a Lumineer team pilot and he takes some serious risks with his quad, but he has better footage than any other pilot out there.
http://www.youtube.com/user/CharpuFPV
Please take the time to subscribe to Charpu’s channel and up-vote his vids!
Charpu lives somewhere in California… And although active in the forums he is still very mysterious. He was kind enough to let me use some of his footage on the front page of the site, so I felt that I should make a page about him.
Charpu PIDs
Charpu flies a QAV250 on 4s with Kiss secs and 1950KV motors.
You will notice that Charpu runs his Pids way shorter than stock. This is possible because of his KISS ESCs refresh rate and Naze32 loop time. He runs an insane loop time with a Naze32 (1800 MS) and an ESC PWM refresh rate of 400HZ
His latest PIDs that I have been able to dig up (they change all the time) were:
-
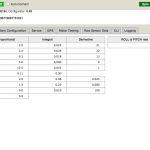
- Charpu’s Naze32 PIDs
If you are a beginner, stick with the stock PIDS to start. Pids need to be tuned on an individual basis. Charpu’s PIDs run like crap on a zmr-250 at high altitude, and on a QAV250 with a different ESC and motor setup, so they should only be used as a reference and not as a starting point.
[wolf_col_6 class=”first”]I am working on building a tuning PID page, and I will post a link here when that happens. For now, Please subscribe for updates to the blog.[/wolf_col_6]
[wolf_col_6 class=”last”][jetpack_subscription_form][/wolf_col_6]
janpirate
good info… hes inspire me too